NEEP602 Course Notes (Fall 1996)
Resources from Space
Excerpt from:
NAS9-17779 - Phase III Final Report
6.0 Considerations for EVA on Phobos
NASA's present thinking about a human expedition to Mars includes a visit
to the Martian moon Phobos, either as a precursor mission or as a sortie
from the interplanetary exploration spacecraft. It is speculated that Phobos
could serve as a staging ground and source of certain resources for the
manned mission to Mars. However, a detailed scenario for human exploration
of Phobos has not yet been formulated, largely because little is known about
the environment there. Hopes for new information from reconnaissance and
sampling by the Soviet probes to Phobos were disappointed when the spacecraft
failed en route (1989).
Despite the saps in present knowledge, the prospects of a manned mission
to Phobos are intriguing. The study team was requested to consider EVA on
Phobos as a sidelight to our analysis of advanced EVA systems design requirements.
Our guidance was not to present definitive requirements but to engage in
creative brainstorming, raise in a preliminary fashion some of the basic
issues for Phobos EVA, and offer some possible approaches or solutions as
"food for thought." The results of this thoughtful exercise are presented
here as practical matters to be considered by mission planners.
6.1 THE ENVIRONMENT OF PHOBOS
The environment of Phobos presents severe technical challenges for EVA
and a set of concerns that differs quite markedly from those for Mars. Gravity
is 0.001 and there appear to be no landscape features or surface amenities
to enable a vehicle or crew to land there. A free crew member on the surface
of Phobos will be in constant risk of "launching" himself; some sort of
reliable restraint will be essential, but the surface may not be amenable
to standard anchors. Some cracks and surface depressions could be filled
with up to 5 meters of debris and dust, making translation and restraint
difficult, especially if these actions raise dust clouds around the crew.
The carbonaceous chondrite surface may pose some problems for the design
of effective spacecraft tether and holding systems.
Phobos Environment (Verrerka, 1988)
In 0.001-g, without effective surface attraction, EVA on Phobos probably
will have more in common with orbital EVA than with activities on the surface
of the moon or Mars. For the crew, the experience might be likened to working
on a large, dusty, and unequipped spacecraft.
The requirement for EVA at Phobos needs to be understood better and justified
in view of the cost of developing supporting technology peculiar to a Phobos
mission. A human expedition on Phobos raises a variety of unique questions.
- Hierarchial arrangement of mission alternatives depending on surface environment (amenable to landing, retentive to probes, dusty)
- (1) Crew vehicle lands and grips on surface
- (2) Crew vehicle tethered to surface from 30 - 50 m height (3-point tether system for energy conservation)
- (3) No landing; crew makes excursion in MMU-type backpack propulsion unit or hovercraft
- (2) Crew vehicle tethered to surface from 30 - 50 m height (3-point tether system for energy conservation)
6.2 HYPOTHETICAL MISSION SCENARIO FOR EVA ON PHOBOS
Three alternatives for Phobos surface exploration were discussed by the
study team. They are presented here for consideration with the caution that
EVA on Phobos raises more issues than can be solved with our current understanding
of the characteristics of this unusual EVA setting.
An exploration team has been sent to the Martian moon Phobos to set up
science stations and communications antennas and to return surface samples
to the Mars orbiting station for analysis and characterization.
Composed of four crew members, the exploration team is similar in all respects
to the Mars surface exploration crews, and their operations are similar
with two major exceptions: the explorers operate from their spacecraft rather
than a surface habitat, and all activity is performed in milli-g rather
than one-third-g. For the purpose of this narrative, it is assumed that
the Phobos excursion spacecraft is a Mars landing module that is employed
prior to its use on the Martian surface.
As the excursion craft approaches the orbit of Phobos, it makes attitude
and velocity corrections to co-orbit with the moon. Detailed inspection
of the surface of Phobos is made from this standoff position. Using visual
and other instruments, the crew determine the composition and density of
the surface soil. This task is necessary to verify earlier assumptions about
the makeup of Phobos and the type of restraint systems that will be required
during any manned surface exploration, surface craft landing attempt, or
installation of science and communications packages. Photographic and video
records are made of all phases of the inspection.
When it has been determined that the surface can support manned inspection
and installation of equipment, the crew of two EVA scientists prepare to
launch their surface module just as they would for the Mars surface mission.
The surface module, or a near-surface vehicle If more appropriate for the
composition of the regolith, is launched; it will be returned to the spacecraft
after the Phobos inspection for use in the Mars landing. For this first
scenario, we assume that an actual surface landing is possible.
Landing on the surface of Phobos, the crew deploy the required holding
and vehicle restraint system, which may be automatically deployed devices
such as screws or piton claws. Egressing from the surface module, the crew
use tethers to leave the vehicle and begin implanting pitons and guys along
the surface route. Both equipment and crew must be tethered to this lifeline
during the mission. It is advisable to use semi-automatic equipment to install
the pitons and guy wire along the selected translation route to reduce crew
workload in the milli-g environment.
The crew install the first science or communications package on the surface.
restrain it to the surface, and deploy any required components. Activation
of science packages can be done immediately after checkout; activation of
communications packages may require an automatic delay if RF energy would
pose a threat to the well-being of the EVA crew during any mission phases.
The EVA crew report back to the orbiting station their progress and discoveries,
and the two members in the orbiting vehicle closely monitor the surface
crew's progress and status.
The EVA crew then go to the next designated site and set up the next equipment
package, installing the tether lifeline along the route. At the conclusion
of the surface EVA, the crew use the lifeline to translate back to the surface
module and prepare for ascent to the orbiting station.
The requirement to be tethered to the Phobos surface while performing the
exploratory EVA might be mitigated by using MMU-type propulsion systems.
This approach would depend upon the regolith composition and any thruster
plume disturbance on the surface, which might raise unacceptable amounts
of dust and powder. The use of MMUs also might mean that the crew could
work directly from the orbiting station, shuttling equipment between the
station and the Phobos surface and not having to use a surface module. The
feasibility of this second scenario would depend upon a much better understanding
of the characteristics of Phobos than is currently available.
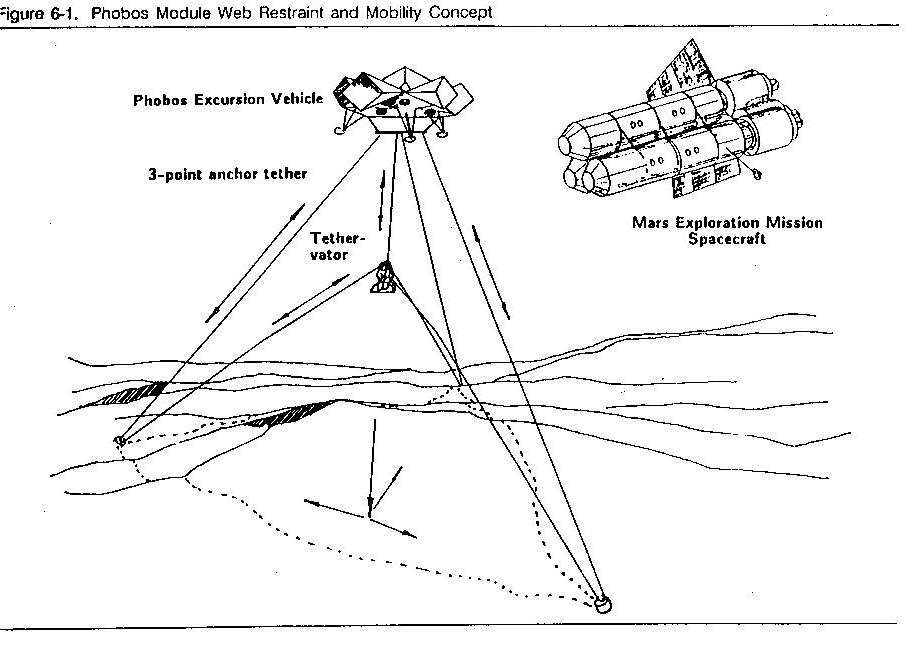
A third scenario would not involve either a lander or an MMU-type of approach
to Phobos, but would rely on deployment of a Module Web from an exploration
and crew support module orbiting Phobos in a stationary alignment. The Module
Web, shown in Figure 6-1, would
consist of at least three cable loops fired from the orbiting module
into the surface of Phobos, with one end of each loop remaining at the orbiter.
With three loops firmly attached to the surface, the crew and equipment
could be lowered to the surface on a taut tether from the orbiter. As the
end of any one of the surface cables is retracted inside the orbiter, the
other ends of all the cables, now harnessed together, are drawn to the Phobos
surface. This tension and retraction method of going to the surface and
being able to remain there would require upward thrust by the orbiter to
compensate for the downward tug of the tension cables.
{kind=link}
Once on the surface, the crew can translate anywhere within the boundary
of the triangle defined by the three surface points which hold the cable
loops. Equipment can be shuttled to the surface on tethers and set up anywhere
within the triangle. When the exploration and installation tasks are accomplished,
the crew ride up the center tether and unharness the cables from the orbiter.
The orbiter returns to the interplanetary vehicle or maneuvers to another
location over Phobos, where the crew repeat the web building for another
EVA.
6.3 SYSTEMS DESIGN REQUIREMENTS FOR EVA ON PHOBOS
Given the hypothetical nature of the mission scenario, this discussion
of possible requirements is not intended to be definitive. It is, however,
pragmatically suggestive.
6.3.1 General
6.3.2 Spacecraft Features
- Effect positive "mooring" (attachment) to the Phobos surface. Note: Phobos surface properties are incompletely known. Before landing gear can be designed, the physical parameters of the surface regolith must be determined, or the gear must be designed to accommodate the range (variety) of surface soil mechanics properties anticipated.
- Provide discharge of any electrostatic charges
- Provide touchdown and liftoff indication. Rebound or bounce-off probably is a problem due to the low level of gravity.
6.3.3 Surface Installations
6.3.4 EVA Crew Aids
Spacecraft-mounted extensible/deployable devices
Extendible rails, booms (rigid/semi-rigid), translation and restraint aids for close proximity to spacecraft EVA, e.g., an RMS-type device with telescoping arms; inflatable booms in triplet attached at the outer end to create an open pyramid configuration; telescoping rigid segments attached by the crew member while moving out from the spacecraft.
Tethers and a tether management system. The low gravity may create a "spaghetti bowlX' ff loose, flailing tethers; thus, some method of managing the tethers to avoid entanglements will be mandatory. One such concept, the Module Web and "tethervator," is mentioned and illustrated above
Anchored supports (equipment, rails, tethers, facilities). Stakes, posts, and pylons (in increasing
size/length), possibly with permeating adhesive, will be required to affix
various items to the Phobos surface.
Attachment (anchorinq) mechanisms will be required for a variety of surface materials (loose sand or dust, consolidated or compacted, etc.). The following items are suggested for consideration:
Masonry nail gun (recoilless) for attaching restraint device mounts to hard rock surface
Vacuum qualified "cement" to bond attachment fittings or the restraint device itself to hard rock surfaces
Zero torque augers to penetrate deep regolith with helical or expandable anchors (deadmen)
Recoilless post driver for shallow regolith with solid rock beneath.
Safety cages, such as a geodesic frame, to serve as a work area with safety
restraints, purchase points, and foot restraint mounting surfaces. These
open framework cages could be emplaced around high-intensity
work sites, facilities, and science stations to create a more effective
and safer work environment. Candidate sites for these "cages" might include
science stations, mining/extraction facilities, tank farms, and temporary
sites of high activity.
Smart MMU (or future equivalent): An MMU-type device on Phobos must have rendezvous capability because it would have considerable range potential. It would need to have computer and IMU capability as well as radar or laser and VHF ranging.
Ballast "turtle" to add mass to an EVA suited crew member. Five metric tons of ballast (mass) would give a crew member a "weight" of about 15 pounds.
6.4 MISSION PLANNING CONSIDERATIONS FOR PHOBOS EVA
Assuming that daytime EVA on Phobos is more appealing for crew safety and
efficiency than EVA in the dark, light will be a primary consideration in
mission planning. Assessment of the orbital mechanics of Phobos and Mars
reveals that part of the moon may be a more suitable site for initial EVA.
The orbital period of Phobos is approximately 7 1/2 hours, of which about
3/4 hour is in Mars shadow at worst case (equinoctial alignment). At solstitial
alignment, Phobos does not pass through Mars' shadow (see Figures 6-2 and
6-3).
Phobos rotates once per orbit, with the same end always toward the center
of Mars. Thus, Phobos has day-night cycles (7 1/2 hours) with any given
site in direct sunlight for about 3 3/4 hours during each cycle (disregarding
Mars shadow passage) (see Figure 6-4). However, the nadir end of Phobos
receives reflected light from the Mars dayside surface during the time the
nadir end is away from the sun. Thus, as the nadir end passes into its solar
dark phase, it begins to receive light from the Mars surface. At local high
noon on its dayside pass, the nadir end of Phobos is illuminated by reflected
light from the sunlit Mars "disk," the diameter of which subtends an angle
of about 40o.
During the solstitial phase, Phobos' nadir end is in continuous light,
and during the equinoctial phase, the nadir end is in darkness for approximately
3/4 hour of each orbit. Thus, the nadir end of Phobos appears to be a prime
candidate site for an initial EVA mission if light is a major consideration.
Note also that the nadir end of Phobos will be the most easily observable
site from a low orbiting spacecraft (e.g., command spacecraft), and rendezvous
from lower orbit is usually easier to execute from below (toward the nadir
end).
The thermal environment of Phobos should be roughly analogous to lunar
conditions, but colder. The radiation environment also should be roughly
analogous to the moon with a peculiar exception. It may be possible to execute
a retrograde synchronous orbit around Phobos at a low altitude so as to
stay always on the down sun side of Phobos. The purpose of this maneuver
would be to use the mass of Phobos for radiation shielding. The orbital
mechanics of such a maneuver need to be verified.
While none of these considerations is an overriding issue in selecting
a Phobos landing site, they are potential factors for mission planning.
 |
|
University of Wisconsin Fusion Technology Institute · 439 Engineering Research Building · 1500 Engineering Drive · Madison WI 53706-1609 · Telephone: (608) 263-2352 · Fax: (608) 263-4499 · Email: fti@engr.wisc.edu |
Copyright © 2003 The Board of
Regents of the University of Wisconsin System.
For feedback or accessibility issues, contact
web@fti.neep.wisc.edu.
|